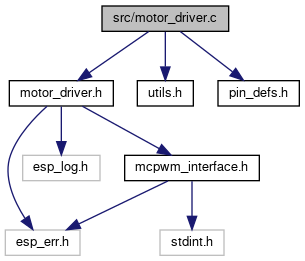
Include dependency graph for motor_driver.c:
Functions | |
| esp_err_t | enable_motor_driver (motor_handle_t *motor, int motor_id) |
| Enable motor driver. More... | |
| esp_err_t | set_motor_speed (motor_handle_t motor, int direction, float speed) |
| int | get_motor_driver_status () |
| Checks if the motor driver is engaged. More... | |
Function Documentation
◆ enable_motor_driver()
| esp_err_t enable_motor_driver | ( | motor_handle_t * | motor, |
| int | motor_id | ||
| ) |
Enable motor driver.
- Parameters
-
motor_handle_t Motor object handle motor_id set it as MOTOR_A_0, MOTOR_A_1 to select the appropriate motor to bind to the handle.
- Returns
- ESP_OK: Success
- ESP_ERR_INVALID_ARG: Invalid argument
- ESP_FAIL: Failed
◆ get_motor_driver_status()
| int get_motor_driver_status | ( | ) |
Checks if the motor driver is engaged.
- Returns
- true if the motor driver is engaged, false otherwise.
◆ set_motor_speed()
| esp_err_t set_motor_speed | ( | motor_handle_t | motor, |
| int | direction, | ||
| float | speed | ||
| ) |